Le Convertawings " Quadrotor".
"" Complication apparente, simplification effective ""

Un hélicoptère très complexe.
Son histoire grâce à Aviation Magazine n°220 du Ier février 1957.
Texte de Jacques Gambu, photo de Howard Levy
Historique: Les premiers vols libres du Convertawings Model A "Quadrotor" ont été effectués le 30 mars 1956. Au cours de ces vols, toutes les manœuvres que l'on peut attendre d'un hélicoptère ont été effectuées et, en particulier, des virages complets, des évolutions latérales, des marches arrière et des vols lents de translation, ainsi que des tours complets sur soi-même.
D'autres vols furent accomplis le 9 avril suivant et, cette fois la machine prit suffisamment d'altitude pour s'affranchir de l'effet de sol et entrepris des vols de translation à une vitesse d'au moins 80 km/h, vols coupés d'arrêts rapides. Les performances furent notables pendant les vols accélération-arrêt, et on ne nota aucune vibration sensible. On s'aperçut ainsi que la maniabilité était plus comparable à celle d'un avion qu'à celle d'un appareil à voilure tournante.
Les essais prouvèrent que l'appareil dans sa configuration actuelle de banc d'essai volant, annonçait une nouvelle formule d'hélicoptère parfaitement valable, au moins en ce qui concerne les qualités de vol. En gros, le "Quadrotor" consiste en un engin à quatre rotors disposés en carré et dont le mouvement est mécaniquement synchronisé. De ce fait, le contrôle de pas cyclique peut être supprimé, de même que chaque rotor étant à petites dimensions mais de rotation rapide, les articulations ont pu être supprimées pour les pales qui sont attachées élastiquement sur la tête de rotor. Tout ceci a été vérifié en vol et le pilotage a prouvé que le contrôle de l'appareil était satisfaisant uniquement en faisant varier simultanément ou différentiellement la poussée de chaque rotor en agissant sur le pas de ce dernier d'une manière collective.

Malgré sa complexité apparente, l'hélicoptère Convertawings se présente comme le champion de la simplication. C'est, du moins, ce qu’annonçait son créateur H. Kaplan.
Source: Aviation Magazine n°220 du 1er février 1957.
 Breguet-Richet n°1, en septembre 1907 cette machine a été la première à faire un vol vertical avec pilote utilisant des rotors. Source: Helicopters 1900-1960 éditions aux Phoebus Publishing Co/BPC.
Breguet-Richet n°1, en septembre 1907 cette machine a été la première à faire un vol vertical avec pilote utilisant des rotors. Source: Helicopters 1900-1960 éditions aux Phoebus Publishing Co/BPC.

En 1923, l'appareil d'Oemichen était également à quatre rotors, de même que celui de Bothezat, aux Etats-Unis. La découverte ultérieure du principe de l’auto rotation oeuvre de la Cierva, et celle de la commande du pas cyclique cristallisa les recherches modernes sur un appareil à rotor unique et c'est sous cette forme que les premiers hélicoptères véritablement pratique virent le jour. La tendance vers la simplification de l'hélicoptère, appareil compliqué par définition, était opposée à l'éventualité de multiplier le nombre de rotors qui sont le siège principal de la complication. Cependant, à mesure que l'on demandait plus à cet appareil, il fallait envisager de répartir la poussée sur un nombre de voilures tournantes supérieur à l'unité. Dans le cas de l'appareil birotor en tandem, latéral, coaxial ou engrenant, la complication reste multipliée par deux, sinon plus. Par contre, la multiplication par quatre du nombre des rotors se traduit par une diminution sensible de la complication, du fait, par exemple, de la suppression de la commande de pas cyclique.

 L'hélicoptère de Etienne Oemichen prend son envol, le 11 novembre 1922, la machine de l'ingénieur Peugeot a réussi à voler à 60 mètres. Enfin, en mai 1924, il a terminé premier sur un kilomètre en circuit fermé sur cet hélicoptère en 7 minutes 40 secondes. Sur ce vol Oemichen a décollé environ 14 minutes.
L'hélicoptère de Etienne Oemichen prend son envol, le 11 novembre 1922, la machine de l'ingénieur Peugeot a réussi à voler à 60 mètres. Enfin, en mai 1924, il a terminé premier sur un kilomètre en circuit fermé sur cet hélicoptère en 7 minutes 40 secondes. Sur ce vol Oemichen a décollé environ 14 minutes.


 Sur sa première version, l'appareil reçut des ailes fixes qui doivent être reprises plus tard, équipées de volets de courbures spéciaux. Les rotors sont quadripales.
Sur sa première version, l'appareil reçut des ailes fixes qui doivent être reprises plus tard, équipées de volets de courbures spéciaux. Les rotors sont quadripales.


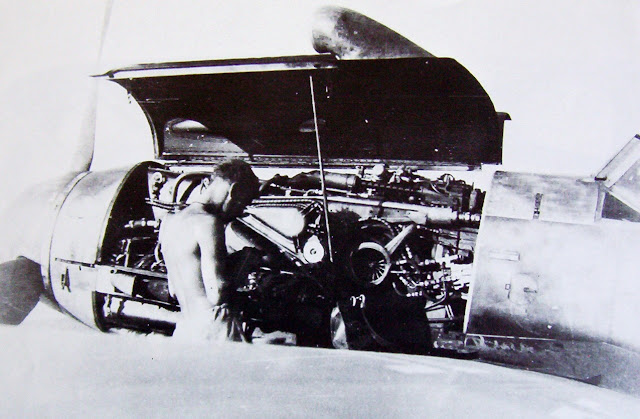
 La seconde version du prototype et son ensemble moteur-rotors arrière. On remarque la transmission à poulies, l'arbre de synchronisation et la simplicité du système de commande de pas des rotors. Les pales sont tenues par des lames.
La seconde version du prototype et son ensemble moteur-rotors arrière. On remarque la transmission à poulies, l'arbre de synchronisation et la simplicité du système de commande de pas des rotors. Les pales sont tenues par des lames.


Le premier développement de la firme concerne un appareil convertible. Ce projet a été établi en fonction des spécifications de l'USAF et de l'US Navy et comprend un appareil biplace expérimental doté d'une voilure, aux extrémités de laquelle on trouve les deux rotors de petit diamètre tournant à haut régime. L'appareil devait être propulsé par deux turbines Boeing 502 et devait atteindre, en translation, la vitesse de 400 km/h. Le passage de la configuration avion à celle hélicoptère se faisait par simple pivotement des ailes, selon leur axe longitudinal propre.
Un élément de voilure équipé d'un rotor a été expérimenté longuement sur un banc tournant. L'appareil devait préparer une version définitive équipée de turbines Allison T-38 et pouvant transporter de 15 à 20 passagers.
Le Model E n'est qu'une extrapolation du Model A. Bien entendu, sa mise en construction dépendait des résultat finaux des essais du prototype. Les quatre rotors étaient quadripales, mais de même principe que ceux du Model A. Au poids total de 19 tonnes, les quatre voilures tournantes, d'un diamètre de 16 m, étaient entraînées par quatre moteur Pratt et Whitney R-1820 de 1 425 ch au décollage et 1 275 ch nominaux, disposés sous les quatre rotors.
On attendait de l'appareil une vitesse ascensionnelle de 9,50 m-sec. sur sur les quatre groupes et de 2 m-sec. sur trois moteurs, ceci en vol vertical. En vol oblique, ces chiffres devaient respectivement devenir 10,60 m-sec. et 6 m-sec.
La vitesse maximum était fixée à 280 km/h et le rayon d'action à 500 km, avec une charge utile de cinq tonnes. Il pouvait transporter 76 passagers sur 160 km et 60 sur 480 km.
Le Model F était une version à hautes performances des modèles précédents A et E. Quatre turbines à gaz Continental (Turboméca) "Artouste", ils étaient placées sous les rotors.
Ceux-ci étaient quadripale engrenant, de façon à augmenter la compacité de l'ensemble. Les pales étaient très minces et de construction entièrement métallique. Des pales ainsi réalisées dans la masse par la firme Jacobs Aircraft and Engine C° ont été essayées en vol sur le prototype Model A et ont donné toute satisfaction.
On ne sait rien des performances attendues de l'appareil, dont la voilure arrière était maintenant trapézoïdale, mais on prévoyait qu'elles avoisinent celles des avions classiques à hélices.
Jean-Marie.
Un fait important remarqué est que les commandes de pilotage ne sont plus sollicitées en retour par le rotor sustentateur, et sont affranchies des problèmes de vibration, d'inertie et d'effets aérodynamiques. On a presque affaire, du moins c'est l'impression du pilote, à des commandes presque irréversibles. La facilité de pilotage et, surtout, la douceur des commandes et l'absence de vibration et battements ont permis tout de suite de conduire les essais avec plus de rapidité et d'envisager immédiatement les développements futurs de la formule.
D'autre part, le "Quadrotor" employant des rotors relativement petits mais tournant vite, les rapports de réduction des transmissions sont d'autant plus diminués. Enfin, les quatre rotors font appels à des éléments identiques et cette constatation implique un prix de revient et des conditions de fabrication qui ne peuvent être que favorables.
"" Les machines à rotors multiples ""
La forme de l'hélicoptère à rotors multiples n'est pas une invention de David H. Kaplan. Bien avant lui, des chercheurs, et les premiers, ont songé à employer des systèmes de rotors multiples et, notamment, à quatre rotors. C'est le cas de l'hélicoptère Breguet-Richet qui utilisait quatre rotors biplans et qui fut la première machine à voilure tournante capable de soulever un homme.


Le giroplane Breguet-Richet n°1. Cette forêt de mâts est le premier appareil à voilure tournante qui ait soulevé son pilote, M. Volumard, le 24 août 1907, à Douai. Le vol ne fut homologué, l'appareil ayant été maintenu par des aides. (photo Breguet-AMD).
Source: La revue Mach 1 n°21 aux éditions Atlas.
En 1923, l'appareil d'Oemichen était également à quatre rotors, de même que celui de Bothezat, aux Etats-Unis. La découverte ultérieure du principe de l’auto rotation oeuvre de la Cierva, et celle de la commande du pas cyclique cristallisa les recherches modernes sur un appareil à rotor unique et c'est sous cette forme que les premiers hélicoptères véritablement pratique virent le jour. La tendance vers la simplification de l'hélicoptère, appareil compliqué par définition, était opposée à l'éventualité de multiplier le nombre de rotors qui sont le siège principal de la complication. Cependant, à mesure que l'on demandait plus à cet appareil, il fallait envisager de répartir la poussée sur un nombre de voilures tournantes supérieur à l'unité. Dans le cas de l'appareil birotor en tandem, latéral, coaxial ou engrenant, la complication reste multipliée par deux, sinon plus. Par contre, la multiplication par quatre du nombre des rotors se traduit par une diminution sensible de la complication, du fait, par exemple, de la suppression de la commande de pas cyclique.

Oemichen 1924, helicoptères n°2, avait quatre rotors et huit hélices de stabilisation, alimenté par un seul moteur Gnome-Rhône de 120 ch.
Source: Helicopters 1900-1960 aux éditions Phoebus Publishing Co/BPC.

Source: Helicopters 1900-1960 aux éditions Phoebus Publishing Co/BPC.

Souvenirs/Souvenirs, photo prise d'un Cierva C.30 A (Avro Rota) vers la fin des années 30 par mon père sur l'aérodrome de Doncourt-Les-Conflans (54). Collection personnel.
Des études analytiques ont prouvé que le rapport poids utile-poids total d'un hélicoptère augmentait avec le nombre de rotors, pour une même surface balayée, ou plutôt pour une même charge surfacique. La limitation des performances de l'hélicoptère à rotor unique a conduit les bureaux d'études à rechercher de nouvelles configurations et c'est ainsi que sont nés les appareils du genre VTOL, STOL et même convertibles. Kaplan pensa, au contraire, que l'hélicoptère n'était pas au bout de ses possibilités, mais qu'il fallait l'envisager tout autrement si l'on voulait en augmenter le rendement. C'est ce qui amena notre homme à la formule à rotors multiples et au "Quadrotor".
Après avoir conduit de nombreux essais partiels, qu'ils soient relatifs au principe même ou qu'ils se rapportent à la configuration définitive de l'appareil, le créateur du "Quadrotor" fut finalement persuadé que son engin apporterait la solution à tous les problèmes de l'utilisation plus intensive et plus rentable de l'hélicoptère.

Le prototype du "Quadrotor", après modifications, a reçu des rotors bipales légèrement engrenant. Les éléments de voilure ont été démontés des poutres latérales.
Source: Aviation Magazine n°220 du 1er février 1957.
L e "Quadrotor" de base comprend un ensemble d'ailes en tandem ou de poutres porteuses, en fort dièdre, comportant un rotor articulé à chaque extrémité. Cette formule bien précisée revendique quelques avantages qui sont les suivants:
Poids: La conception d'un rotor est soumise à la sujétion grave qu'est la vitesse en bout de pales. A mesure que la taille du rotor augmente, cette vitesse augmente dangereusement. A ce moment, le système à rotors multiples s'impose car il fournit une même surface balayée sans pénalité de poids d'un rotor de grandes dimensions à faible rotation. Un remède relatif consiste à augmenter la charge surfacique, mais cela ne conduit qu'à des inconvénients. Le système à rotors multiples autorise des vitesses de rotation plus grandes qui réduisent les poids des rotors. Par exemple, dans le cas du "Quadrotor", le poids des pales est réduit de 24% par rapport à un rotor simple de même surface balayée. Cet avantage se complète de celui qui consiste à faire porter les rotors par des poutres simples plus légères qu'une tête de rotor importante, munie des commandes de pas cycliques et collectif.

Source: Aviation Magazine n°220 du 1er février 1957.
Maniabilité: Les qualités de maniabilité ont dépassé tous les espoirs placés dans la formule. On a, notamment remarqué, un vol stationnaire parfaitement stable et facile à tenir, une absence de vibration et de battements aux commandes, un effort homogène sur les commandes lors des vols inclinés, latéraux ou en translation, une grande aisance au manche et au palonnier grâce au "thrust control system".
Commandes: La conduite de l'appareil est obtenue par changement de poussée des rotors, ce qui élimine la commande de pas cyclique. Ceci conduit à une grande simplification de la tête des rotors et à une baisse du poids. D'autre part, les réponses aux sollicitations sont si puissantes qu'elles ont permis de s'affranchir du problème classique de pilotage d'un hélicoptère monorotor. De plus, le décrochage des pales ne doit pas affecter le pilotage lui-même.
Vulnérabilité: La vulnérabilité est réduite grâce à l'augmentation du régime des rotors et la diminution des poids des systèmes d'entraînement et de commande. Ceci permet de dessiner les pièces avec une grande marge marge de sécurité.
D'autre part, seule la disposition à quatre rotors permet d'assurer le retour au sol dans de bonnes conditions en cas de rupture d'un de ces rotors en vol. Pour autant que la comparaison puisse être avancée, le "Quadrotor" apporte à l'hélicoptère la sécurité du quadrimotor.
Simplification: Un seul exemple suffit à le démontrer. Le "Quadrotor" comprend, dans son système d'entraînement des rotors, douze pignons de quatre types différents. Un hélicoptère classique en comporte 18 de sept types différents.
Encombrement: Là encore, deux rapports suffisent. Le "Quadrotor" est 30% plus court et 11% moins large qu'un hélicoptère classique ayant la même surface balayée.
Vibrations: Les problèmes des vibrations sont nettement réduits du fait du grand régime de rotation des rotors. Cela autorise, ce qui n'est pas négligeable, une plus grande tolérance dans la fabrication des pales.
"" Les avantages du "Quadrotor""
La configuration à quatre rotors malgré sa complexité apparente, apporte des avantages certains.
C'est ainsi que l'on peut remarquer tout de suite qu'un développement possible de la formule consiste à monter un moteur directement sous chaque tête de rotor et que la structure des poutres supportant ces rotors peut être aisément habillée par des surfaces portantes ainsi qu'il fut fait sur le prototype. Ces éléments de voilure rectangulaire, donc de section constante, sont faciles à construire.
D'autre part, il faut noter que les pales sont moitié moins longues que celles d'un hélicoptère classique équivalent. La flexion de ces pales au repos, est de 65% plus faible. L'absence possible de moteur dans le fuselage apportera une sécurité accrue des passagers, de même qu'elle accordera un maximum de latitude dans la disposition des espaces disponibles pour le fret, etc.
Dès sa conception, le "Quadrotor" a été prévu pour pouvoir utiliser des surfaces fixes porteuses déchargeant d'autant les rotors sustentateurs. Une telle adaptation sur un hélicoptère monorotor est difficile en raison de l'instabilité intrinsèque de cet engin. De plus, un calage définitif de la voilure sera choisi pour fournir une portance donnée et assurer le vol en translation avec un rotor déchargé et travaillant à petit pas.

Le fuselage en treillis du "Quadrotor". Source: Aviation Magazine n°220 du 1er février 1957.
Le "Quadrotor" peut utiliser avec efficacité des voilures dotées sur une grande profondeur, de volets de courbure qui se braqueraient vers le bas en vol stationnaire, par exemple, afin de limiter au possible les charges aérodynamique vers le bas. Enfin, la présence de quatre rotors et des quatre voilures assurera un très bon amortissement en roulis et accordera une bonne stabilité.
Rappelons que les voilures actuellement en fort dièdre, accordent cette stabilité sans le secours d'aucune surface verticale.

"" Le "Quadrotor" prototype ""
Le prototype se présente sous la forme générale d'un fuselage en treillis tubulaire portant à chaque extrémité deux poutres latérales en caisson disposées en fort dièdre. Chacune de ces poutres supporte, à son tour, un rotor de petit diamètre.
La puissance est délivrée par deux moteurs Continental de 90 ch disposés aux extrémités du fuselage. Chaque moteur entraîne un long arbre qui court d'un bout à l'autre du fuselage et assure la synchronisation des deux ensembles de rotors. C'est d'ailleurs la présence de cet arbre qui, nécessairement, est placé dans l'axe du fuselage, qui a imposé le déport du poste de pilotage vers la gauche, cependant que le réservoir est déporté vers la droite.
Revenons aux moteurs. A chaque extrémité du fuselage, on trouve le dispositif suivant: le moteur est placé sous l'arbre qu'il entraîne par l'intermédiaire d'un ensemble de six courroies trapézoïdales travaillant bien entendu dans six poulies à gorge.
La poulie multiple supérieure est solidarisée de l'arbre avec interposition d'un embrayage intérieur. Cet embrayage permet aux rotors de tourner en cas d'arrêt des deux moteurs, de passer ainsi en régime d’auto-rotation et, enfin, d'assurer l'entraînement des quatre rotors avec un quelconque des deux moteurs.
La mise en route se fait ainsi: le moteur arrière est démarré d'abord à vide, puis il commence à entraîner tout l'ensemble sustentateur grâce à un simple système de tension des six poulies de transmission. Le moteur avant est ensuite démarré lorsque les rotors ont pris leur régime normal avec le seul secours du moteur arrière.
La solution bimoteur a été choisie afin d'étudier tout de suite un système de commande pour hélicoptère multimoteur. Chaque extrémité de l'arbre attaque les arbres secondaires transmettant le mouvement aux rotors, par l'intermédiaire d'un réducteur de rapport 2/3. Chaque arbre secondaire attaque, enfin, la tête de rotor par un simple pignon qui assure le renvoi du mouvement et aussi une nouvelle réduction du régime dans le rapport de 3 à 1.
Ainsi, le rapport global de réduction est de 4,5/I.

Le mode d'entraînement de la première version comportait des courroies en néoprène...

...circulant dans les poutres et attaquant un large tambour de pied de rotor.
Source: Aviation Magazine n°220 du 1er février 1957.
Immédiatement à la sortie de la boîte de renvoi, on trouve un joint universel qui permet, durant la période d'essais de faire varier le calage des rotors. Tout l'ensemble de la transmission absorbe 17% de la puissance des moteurs en sorte que les rotors ne reçoivent, au maximum, que 150 ch au total.
L'ensemble est normalement prévu pour absorber une puissance pouvant aller jusqu'à 300 ch. Les deux moteurs sont refroidis par des ventilateurs placés devant chaque rangée de cylindres. Sous sa première forme, le prototype avait un système d'entraînement des rotors différent. Celui-ci consistait en une courroie en néoprène et nylon partant directement des extrémités de l'arbre de synchronisation et allant solliciter un tambour solidaire des rotors. Ce dispositif simple permit de fixer définitivement les rapports de réduction, avant d'en venir au système classique de pignons et renvois d'angles.
L'ensemble est normalement prévu pour absorber une puissance pouvant aller jusqu'à 300 ch. Les deux moteurs sont refroidis par des ventilateurs placés devant chaque rangée de cylindres. Sous sa première forme, le prototype avait un système d'entraînement des rotors différent. Celui-ci consistait en une courroie en néoprène et nylon partant directement des extrémités de l'arbre de synchronisation et allant solliciter un tambour solidaire des rotors. Ce dispositif simple permit de fixer définitivement les rapports de réduction, avant d'en venir au système classique de pignons et renvois d'angles.

Source: Aviation Magazine n°220 du 1er février 1957.
Chaque rotor comprend trois pales de 17 cm de largeur et dotées d'un profil NACA 0015. Soulignons que les voilures fixes, montées sur la première version du prototype, étaient munies d'un profil NACA 0023. Les pales tournent à une vitesse de 549 tr/mn et leurs extrémités sont animées d'une vitesse tangentielle de 170 m/sec. Notons encore que les quatre disques de rotors se chevauchent de 20% de leur surface. Bien entendu, il n'y a qu'une commande de pas général, réalisée très simplement. En somme, chaque rotor se comporte comme une grande hélice à pas variable, tout simplement.
L'ensemble repose sur un atterrisseur tricycle fixe amorti par sandows et dont la roue avant est totalement orientable.
Enfin, signalons que l'appareil est contrôlé en vol par un tachymètre et un synchroscope indiquant les vitesses des moteurs et celles des rotors et leur rapport.
"" Caractéristiques Convertawings model A ""
Diamètre des rotors: 5,95 m.
Surface balayée: 111,30 n².
Poids total: 997 kg.
Charge surfacique: 8,94 kg-m².
Puissance: Deux continental C-90 de 90 ch.
Performances: Non divulguées.
Poids total: 997 kg.
Charge surfacique: 8,94 kg-m².
Puissance: Deux continental C-90 de 90 ch.
Performances: Non divulguées.

Deuxième version du prototype Quadrotor "A" en vol stationnaire sans effet de sol.
Source: Aviation Magazine n°220 du 1er février 1957.
"" L'ingénieur David H. Kaplan ""

David H. Kaplan était le président et l'ingénieur en chef de la Convertawings Inc., installée à Amityville, dans l'état de New York. Il en était le aussi le chef-pilote d'essais, car il préférait essayer ses propres créations pour, disait-t'il obtenir des "informations de première main".Agé à l'époque de trente trois ans, il était, malgré son jeune âge, doué d'un remarquable don de conception et, aussi, d'une certaine expérience technique. Il devait cette expérience à ses passages dans différentes firmes spécialisées dans la fabrication des appareils à voilure tournante.
Il fut notamment ingénieur d'essais chez Piasecki Helicopter C°, puis ingénieur d'études chez Doman Helicopters et ingénieur d'essais en vol chez Republic, où il était chargé du développement et des essais en vol des instruments de bord. De plus, il était diplomé du Renselaer Polytechnic Institute et a, d'autre part, passé six mois, alors qu'il était sous les drapeaux étoilés, au Massachusetts Institute of Technology, section"Etudes avancées de mécanique". Ajoutons à son bagage une qualification de pilote professionnel pour avion mono et multimoteur et il était, enfin, moniteur sur cinq types différents d'hélicoptères. Il était, encore, membre des diverses sociétés suivantes: Institute of the aeronautical sciences, Society of automotive engineers, American helicopter society et Cenvertible aircraft pionneers.
Evidemment, un tel passé ne pouvait que conduire notre homme à des études et réalisations personnelles. C'est ce qui ne manqua pas d'arriver et David H. Kaplan fonda sa propre entreprise, ainsi que nous le savons depuis le début de lecture.
Il fut notamment ingénieur d'essais chez Piasecki Helicopter C°, puis ingénieur d'études chez Doman Helicopters et ingénieur d'essais en vol chez Republic, où il était chargé du développement et des essais en vol des instruments de bord. De plus, il était diplomé du Renselaer Polytechnic Institute et a, d'autre part, passé six mois, alors qu'il était sous les drapeaux étoilés, au Massachusetts Institute of Technology, section"Etudes avancées de mécanique". Ajoutons à son bagage une qualification de pilote professionnel pour avion mono et multimoteur et il était, enfin, moniteur sur cinq types différents d'hélicoptères. Il était, encore, membre des diverses sociétés suivantes: Institute of the aeronautical sciences, Society of automotive engineers, American helicopter society et Cenvertible aircraft pionneers.
Evidemment, un tel passé ne pouvait que conduire notre homme à des études et réalisations personnelles. C'est ce qui ne manqua pas d'arriver et David H. Kaplan fonda sa propre entreprise, ainsi que nous le savons depuis le début de lecture.
"" Les projets de Convertawings ""
 |
| Projet de convertible Model B birotor |
Un élément de voilure équipé d'un rotor a été expérimenté longuement sur un banc tournant. L'appareil devait préparer une version définitive équipée de turbines Allison T-38 et pouvant transporter de 15 à 20 passagers.
 |
| Projet d'un "Quadrotor" E pour 70 passagers. |
On attendait de l'appareil une vitesse ascensionnelle de 9,50 m-sec. sur sur les quatre groupes et de 2 m-sec. sur trois moteurs, ceci en vol vertical. En vol oblique, ces chiffres devaient respectivement devenir 10,60 m-sec. et 6 m-sec.
La vitesse maximum était fixée à 280 km/h et le rayon d'action à 500 km, avec une charge utile de cinq tonnes. Il pouvait transporter 76 passagers sur 160 km et 60 sur 480 km.
 |
| Le "Quatrotor" Model F rapide |
Ceux-ci étaient quadripale engrenant, de façon à augmenter la compacité de l'ensemble. Les pales étaient très minces et de construction entièrement métallique. Des pales ainsi réalisées dans la masse par la firme Jacobs Aircraft and Engine C° ont été essayées en vol sur le prototype Model A et ont donné toute satisfaction.
On ne sait rien des performances attendues de l'appareil, dont la voilure arrière était maintenant trapézoïdale, mais on prévoyait qu'elles avoisinent celles des avions classiques à hélices.
Jean-Marie.






Commentaires
Enregistrer un commentaire